智能協(xié)作機械臂的誕生
在工業(yè)自動化高速發(fā)展的今天,協(xié)作機械臂已經(jīng)成為制造、教育、科研等領域的重要角色。相比傳統(tǒng)工業(yè)機器人,協(xié)作機械臂更輕巧、更靈活,也更容易部署。隨著人工智能技術的進一步加持,“智能協(xié)作機械臂”正在逐漸成為行業(yè)的新焦點,推動智能制造向更高維度邁進。那什么是智能協(xié)作機械臂呢?這得從協(xié)作機械臂說起,協(xié)作機械臂本身是一類能夠與人類安全協(xié)同工作的機器人裝備,通常具備輕量化設計、力控安全、簡單易用等特點。而“智能協(xié)作機械臂”,是在傳統(tǒng)協(xié)作機器人能力的基礎上融入人工智能算法,使其具備更高的環(huán)境理解力和自主決策能力。簡單來說,智能協(xié)作機械臂不僅能“動”,還能“看”“聽”“學”,并能根據(jù)環(huán)境變化靈活調(diào)整動作,其誕生并非偶然,它是制造業(yè)對更高柔性、更強智能和更緊密人機協(xié)作需求的集中體現(xiàn),具體來說有以下誕生背景:
- 人力成本持續(xù)攀升:全球制造業(yè)普遍面臨用工短缺與勞動力成本上漲的問題,尤其在重復性強、枯燥或高風險的崗位,企業(yè)很難長期依賴人工完成任務。傳統(tǒng)協(xié)作機械臂雖然能分擔部分勞動,但缺乏復雜環(huán)境理解能力,難以完全替代人工,需要大量人為設定和調(diào)試。智能協(xié)作機械臂通過視覺識別、AI 決策與自動運動規(guī)劃,更能夠在不確定的環(huán)境 中執(zhí)行任務,減少對專業(yè)操作人員的依賴。
- 小批量、多品類生產(chǎn)需求爆發(fā):消費升級推動制造模式從“規(guī)模化”向“柔性化”轉(zhuǎn)型,企業(yè)訂單變得多變且更新速度更快。傳統(tǒng)協(xié)作機械臂在面對頻繁更換工裝、調(diào)整流程時,配置成本高、效率低。智能協(xié)作機械臂可依靠拖拽示教、視覺定位和自適應算法,根據(jù)新產(chǎn)品或新任務快 速調(diào)整,無需復雜編程,大幅減少換線成本。
- 自動化門檻依舊偏高:中小企業(yè)普遍缺乏機器人技術人員,傳統(tǒng)協(xié)作機械臂雖然已經(jīng)降低部分使用難度,但在視覺融合、復雜動作規(guī)劃、多工序協(xié)同等方面仍然依賴專家。智能協(xié)作機械臂借助 AI 和軟件生態(tài),讓非專業(yè)用戶也能輕松使用,從而推動自動 化在更廣范圍普及。

智能協(xié)作機械臂帶來的關鍵變革
過去協(xié)作機器人更多承擔重復、固定節(jié)奏的任務,而如今企業(yè)希望機器人能真正參與協(xié)作,處理動態(tài)節(jié)拍、隨機來料、半結構化工位、更安全的人機交互。傳統(tǒng)協(xié)作機器人因缺乏實時感知與預測能力,很難做到在與人共享空間時主動避讓或調(diào)整動作。智能協(xié)作機械臂可謂從多方面實現(xiàn)了進化,與傳統(tǒng)協(xié)作機械臂有著不小的差別:
- 從“可編程”走向“可感知、可理解”:傳統(tǒng)協(xié)作機械臂依賴規(guī)則驅(qū)動,需要人事先定義好每個步驟,環(huán)境稍微變化就要重新調(diào)試。智能協(xié)作機械臂通過視覺、觸覺等感知系統(tǒng),讓機器人能夠理解物體的形狀、位置與差異,進而自動適應變化。這推動機械臂從“執(zhí)行指令”進化為“基于感知做決策”。
- 從“固定流程”走向“自主協(xié)作”:在過去,機械臂需要在固定空間、固定位置執(zhí)行流程,缺乏靈活性。智能協(xié)作機械臂依賴 AI 運動規(guī)劃,可動態(tài)避障、自動尋找最佳路徑,并在與人類協(xié)作時主動讓位、優(yōu)化動作,提升人機協(xié)作效率與安全性。
- 讓自動化不再局限于“結構化場景”:傳統(tǒng)協(xié)作機械臂只能在高度規(guī)則化的場景中工作。現(xiàn)實中的任務往往難以做到完全一致,例如物流倉庫的快遞大小不一、食品加工中物體外形略有差異、來料工件位置存在偏差。智能協(xié)作機械臂能夠通過視覺識別和 AI 判斷,從容處理非標、隨機、動態(tài)的任務, 讓自動化走出封閉工廠,進入更多真實場景。
- 讓機器人“更像一個伙伴”:智能協(xié)作機械臂能聽、能看、能學,可以對人類意圖做出反應,例如通過力控感知判斷人為推動方向、通過視覺捕捉手勢,甚至根據(jù)任務習慣自動優(yōu)化動作。這讓它不僅是一個工具,更像具備協(xié)作能力的工作伙伴。

從傳統(tǒng)協(xié)作機械臂到智能協(xié)作機械臂,這個發(fā)展填補了傳統(tǒng)機械臂在視覺、AI、自適應能力方面的巨大缺口,讓機器人能真正融入開放動態(tài)的生產(chǎn)環(huán)境。智能賦予了機械臂新的功能和屬性,使得其能解決過往所不能解決的困難與挑戰(zhàn):
- 需要大量人工編程與調(diào)試:智能協(xié)作機械臂通過拖拽示教、圖形化界面與自動規(guī)劃,讓沒有機器人經(jīng)驗的人也能快速上手。
- 缺乏環(huán)境理解能力:視覺與 AI 讓機械臂能識別、判斷和定位,實現(xiàn)柔性分揀、非標工件抓取等傳統(tǒng)機械臂難以勝任的任務。
- 無法應對頻繁變化的生產(chǎn)需求:智能協(xié)作機械臂能自動適應位置、姿態(tài)、來料差異,不需要為新產(chǎn)品反復編寫程序。
- 人機協(xié)作效率不高:AI 預測、人機行為建模以及高精度力控,讓機械臂能主動配合人類動作,提高工作流效率與安全。
- 應用門檻高、普及速度慢:通過更智能的軟件生態(tài)、開放平臺和自動化工具包,智能協(xié)作機械臂大幅降低了部署門檻,使自動化走進中小企業(yè)與教育市場。

越疆智能協(xié)作機械臂X-Trainer
越疆作為國產(chǎn)寫作機械臂的佼佼者,近年來的技術路線非常明確,重點不在單純提升機械臂的負載、速度,而在讓協(xié)作機器人更加易用、智能、普惠。通過持續(xù)的技術創(chuàng)新和場景深耕,已經(jīng)將智能協(xié)作機械臂從簡單的自動化工具演進為能夠感知、決策和執(zhí)行的智能伙伴,其全新的一代的具身智能協(xié)作機器人X-Trainer就是最好的代表。
X-Trainer通過引入模仿學習和大模型技術,從根本上改變了機器人的編程和任務執(zhí)行方式,展現(xiàn)出與傳統(tǒng)機械臂截然不同的能力。
- 從“編程”到“學習”:X-Trainer的核心在于模仿學習系統(tǒng)。它通過手動操作來收集人類演示動作的數(shù)據(jù),進而訓練機器人并使其能夠自主復現(xiàn)這些任務。這種方法大幅降低了使用門檻:即使不具備專業(yè)編程知識的操作人員,也能通過“手把手”地 教,讓機器人學會新技能。能捕獲難以編程的“訣竅”:對于一些依賴精細力控或復雜手眼配合的任務,其精妙 之處往往難以用代碼描述,但通過模仿學習,機器人可以直接學到人類的操作精髓。
- 理解與規(guī)劃長序列任務:在與騰訊大模型的合作中,X-Trainer成功實現(xiàn)了國內(nèi)首個復雜長序列任務的具身應用落地。這意味著X-Trainer能夠理解復雜指令,當用戶用自然語言發(fā)出“做一份臘腸飯”的指令時,它能夠理解其中包含的一系列子步驟(準備食材、處理、烹飪等),自主規(guī)劃與執(zhí)行。在任務執(zhí)行過程中,它還能即時響應外部干預,比如臨時調(diào)整配料或改變操作順序,確保了任務的連續(xù)性和靈活性。
- 實現(xiàn)精細操作:X-Trainer集成了多模態(tài)感知技術,并利用視覺伺服和閉環(huán)控制來實時糾正動作誤差。這使得它能夠完成諸如開瓶蓋、疊衣服等對精細度要求很高的家務活,并展現(xiàn)出雙臂協(xié)同精細操作的能力。

X-Trainer的上述能力,使其能夠在多個場景中解決傳統(tǒng)自動化無法應對的問題。
- 工業(yè)制造與裝配:在汽車、3C電子等行業(yè),X-Trainer可以通過學習熟練工人的裝配技巧,快速掌握精密線路板插件、零部件精細裝配等復雜工藝,并將這些最佳實踐標準化地復現(xiàn)出來,保證產(chǎn)品質(zhì)量一致性。
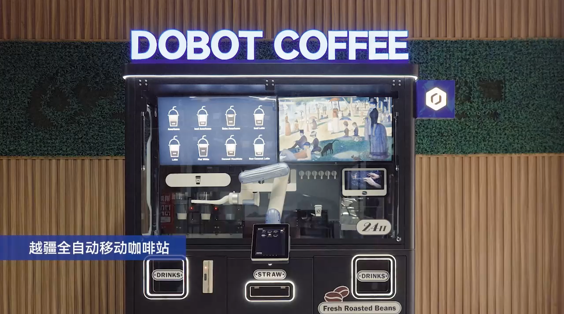
- 新興商業(yè)服務:X-Trainer可以作為智能烹飪助手,獨立完成從食材準備到烹飪出鍋的全流程,例如制作臘腸飯或早餐(倒牛奶、烤面包、擺盤等)。
- 科研與教育:X-Trainer本身就是一個先進的具身智能訓練平臺。在高校和科研機構,它可以用于機器人學、人工智能等領域的教學和前沿技術研究。
總的來說,越疆的X-Trainer代表了智能協(xié)作機械臂發(fā)展的一個前沿方向。它通過 “模仿學習+大模型” 的技術路徑,實現(xiàn)了從“被動執(zhí)行”到“主動學習與規(guī)劃”的跨越,大大增強了機器人在復雜、非標準化環(huán)境中的適應性和解決問題的能力。






 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 醫(yī)療手術
醫(yī)療手術
 半導體
半導體
 科研
科研
 教育
教育
 自動化焊接
自動化焊接
 碼垛
碼垛
 上下料
上下料
 無序分揀
無序分揀
.svg) 點涂膠
點涂膠
 視覺檢測
視覺檢測
 裝配
裝配
 搬運
搬運
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付